Pixhawk双罗盘校准方法
1.GPS不可以带电插拔,带电插拔可能会导致GPS模块损坏,无法搜星。不听劝告,后果自负!
2.校准罗盘成功后,飞控要断电重新连接,这步一定要做。
3.如果使用M8N 带IST8310的GPS,必须刷3.5 V3 以上固件,低于3.5或者V2无法识别。
从3.3.3固件开始,飞控支持使用双罗盘(也就是内置罗盘和外置罗盘同时使用)
但由于内置罗盘容易受干扰,加上如果没有正确校准,容易出现罗盘不同步的错误。
所以,如果飞控加了GPS罗盘,完全可以只使用外置罗盘,因为外置罗盘不容易受干扰,比较稳定!
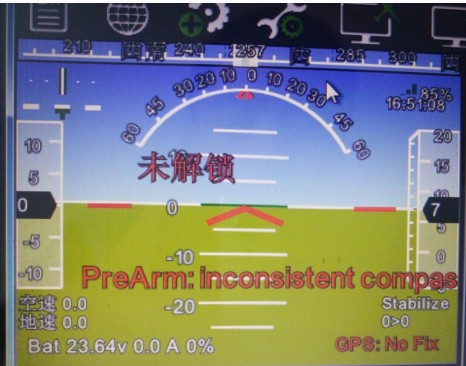
双罗盘如果校准不好,最容易出现这个错误,“罗盘不同步”,请仔细看下面的教程,如果实在不想太折腾,可以只用外置罗盘。
正确接线:
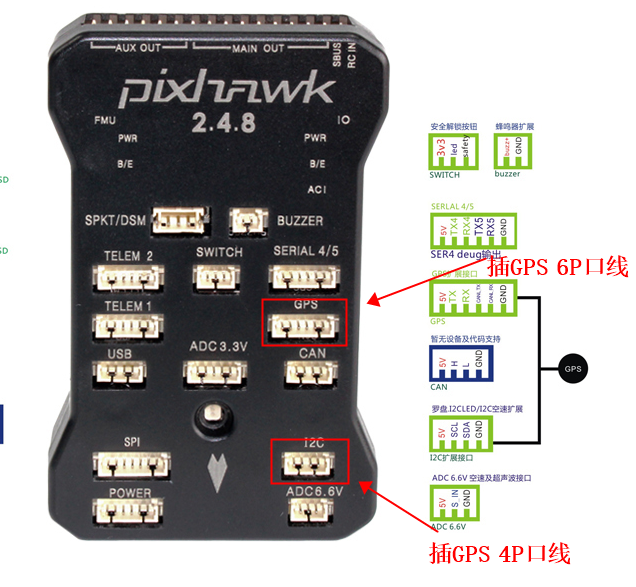
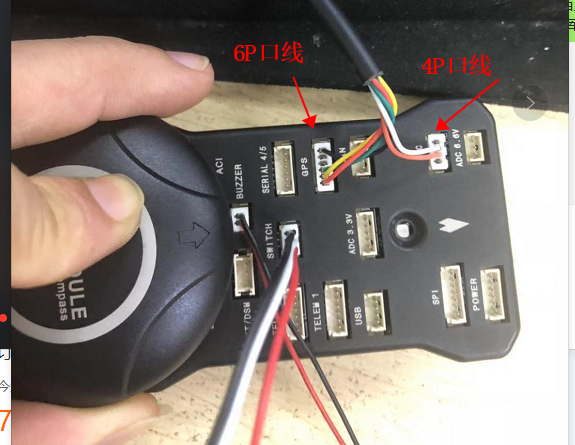
(请注意,GPS不要带电插拔,接线飞控要断电)
如果想实现双罗盘校准,方法如下:
1.组装
由于双罗盘校准过程需要PIX飞控罗盘和GPS罗盘同时转动,而人的两只手是很难做到频率一样的,所以,校准双罗盘要先装机。把飞控和GPS都装到机架上,GPS用支架撑起来远离飞控等干扰源。飞控和GPS的箭头都正确对向机头。
2.设置正确选项
飞控连接地面站,在初始设置-》指南针那里进行校准。

“自动偏移量”的勾要勾起来。
指南针#1 是GPS罗盘,属于外置罗盘,所以外部罗盘的勾要打起来。要选None,不可以选ROLL_180,因为GPS的罗盘和pixhawk飞控的罗盘是同一面且同方向的,所以不像APM2.8那样要旋转180度,这个要注意!
指南针#2是飞控内置罗盘。
确保选项按照上面的图正确设置,之后点击"开始"按钮即可开始校准。
3.进行校准
点击“开始”按钮,会出现两个进度条在动,mag1是GPS外置罗盘,mag2是飞控内置罗盘。
进度条完后会出数据,之后飞控断电重新连接。注意,出数据后不用点击“接受”按钮。

如果罗盘进度条一直在动,一直不出数据的。请参考这里:
请注意,调试罗盘有很多技巧:
1.GPS罗盘和飞控要装在机架上校准,确保GPS的箭头对向机头(PIX飞控箭头也对向机头),不这么做调试出来会出现罗盘不同步
2.校准过程要飞控和GPS罗盘同时转动,否则会出现罗盘不同步的错误。
3.校准成功后,飞控要断电,重新连接地面站。